“时间常数”哪学来的?
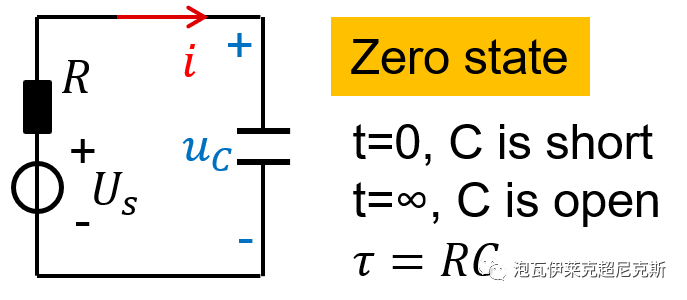
“电路”/“信号与系统”/“自动控制原理”,多次揭示一阶系统的运行规律,其中τ(tao)就是时间常数time constant。电路中,RC串联的零状态响应是典型的一阶电路,τ=RC。
若u(t)为单位阶跃输入,输出y(t)经过3-5个τ的滞后才可近似认为进入了稳态,达到静态增益k。
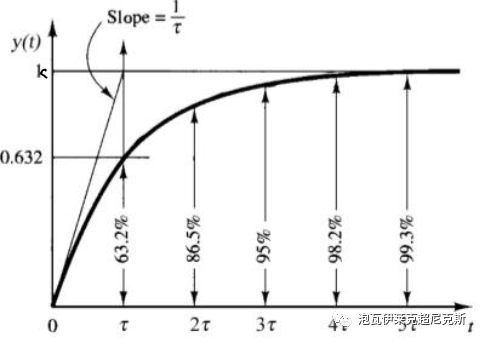
简言之,“时间常数”只针对一阶系统,广义上的时间常数或可针对主导极点为一阶形式的,类一阶的高阶系统。直观地说,它代表了系统对抗外界变化,保持原状的抵抗能力(惯性)。
那么,从稳态来看,只要我身为舔狗等女神足够久,一阶环节的时间常数并不会对直流输入产生影响。
直流书上都有,交流呢?
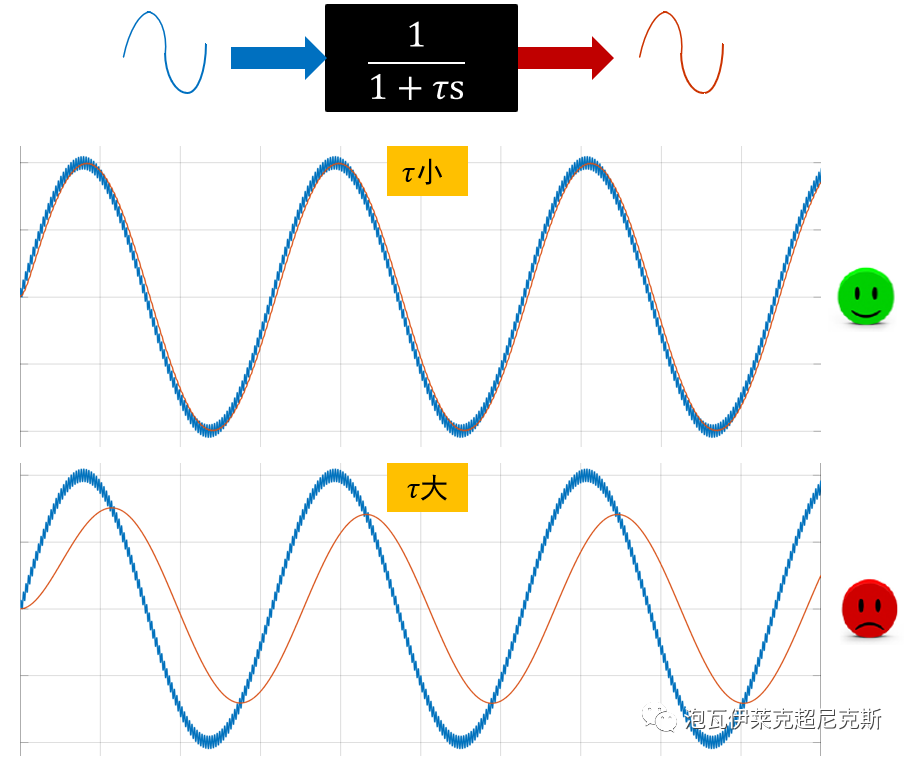
实际工程的采样环节中,除了直流信号,我们常遇到交流信号(或含交流信号)的调理与高频噪声滤除,最简单且典型的,即采用一阶滤波电路实现。
滤掉高频噪声很简单,但我们也应该关心,经过时间常数τ的一阶滤波,正弦输入基波的稳态响应,有没有可能被滤过头?
从用户友好+小白实用的角度出发,必然是直接从时域得到结论。
已知输入波形周期100us,一阶滤波器的时间常数取多少us才可以不失真(幅度,相位)?
系统稳定后,输入输出两个正弦的基波,在时域上有多少延迟?
不必每次都理论计算/仿真,而能秒答这两个问题,加速调试和设计过程,是本文撰写的初衷。
为了尽可能量化,联系理论工具:正弦稳态响应→波特图。
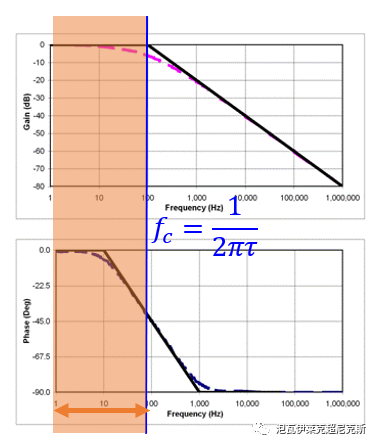
一阶系统波特图和渐近线如下,转折频率为蓝色线fc,输入的ac信号基波频率为绿色线fac。

由图可知,为了几乎不产生衰减和相移的失真,放在转折频率1/10以下,fac<fc/10。
我们就把fac放在fc/10的地方,为了找出时间常数和交流信号,在时域的直接关系,列表如下:
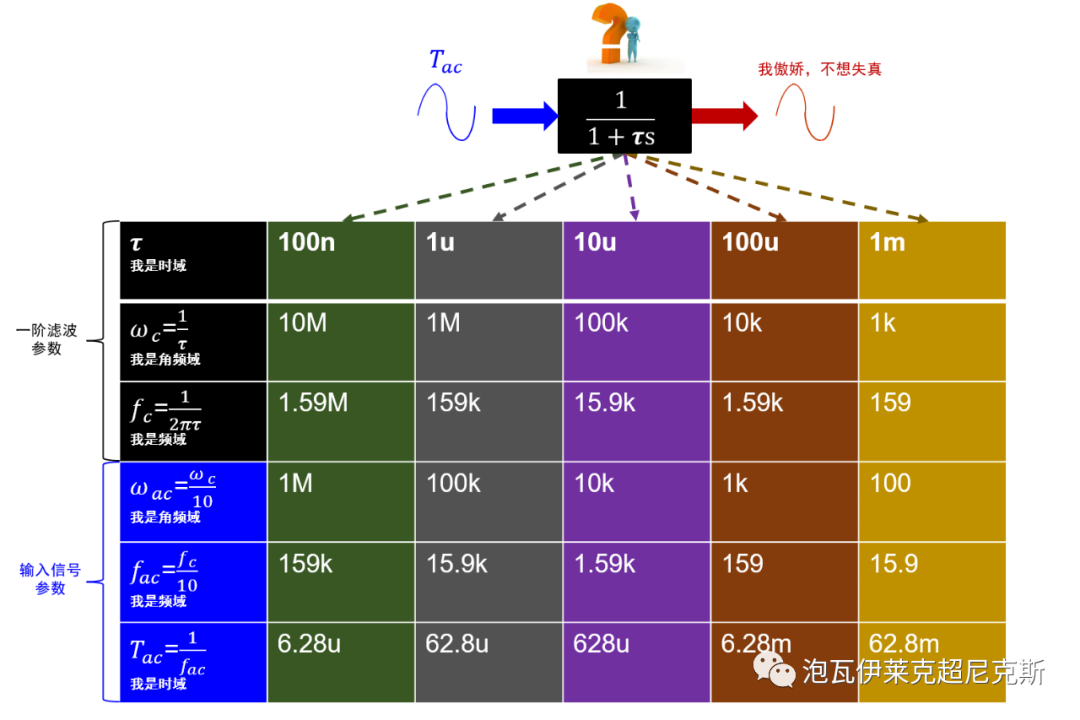
结论:频域幅度和相位的不失真,即时域上幅度缩小和时间延迟近似忽略的情况下,在时域上需求的倍数关系高达62.8,也就是说,针对100us周期的输入信号,滤波器时间常数不要超过1.6us。
那么,为了研究时域延迟,如果让输入信号频率fac在fc之下自由移动,(上图中橙色区域),即周期低于20pi*τ,相移会有负的0°-45°之多,对应的时域呢?
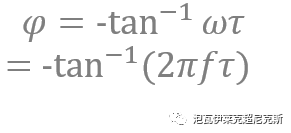
一阶系统相位表达式如下,橙色区域恰对应自变量2pi*f*τ的范围在[0,1]。
百度一下,白嫖个函数图像:
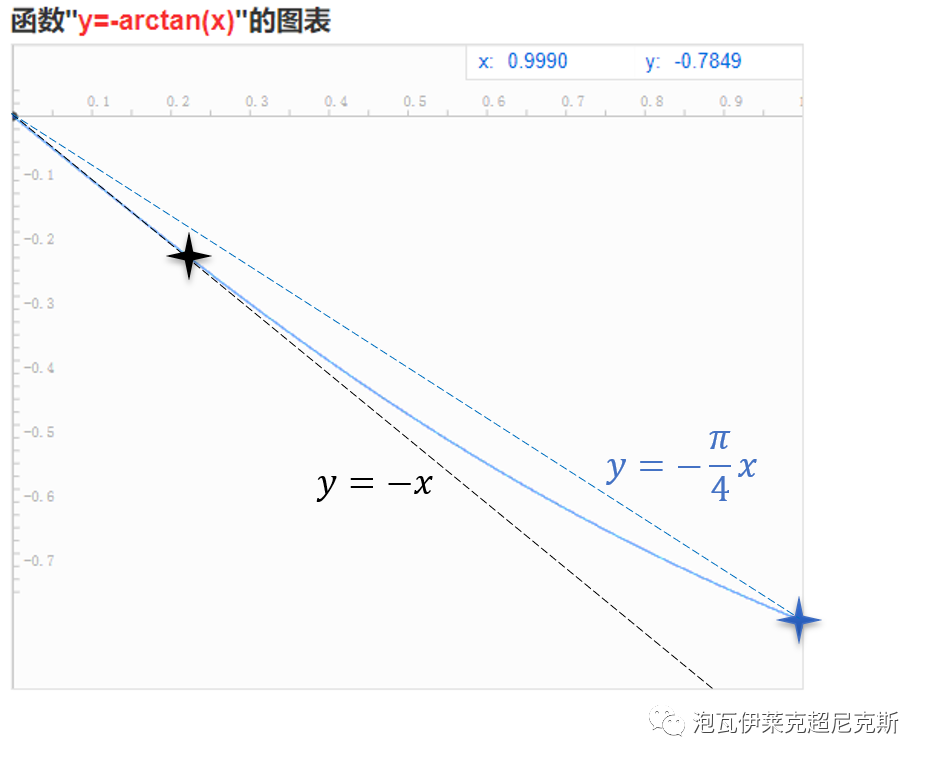
为了避免用大一高等数学的泰勒展开和各阶近似把人绕晕,直接由图可知:
x→0(无穷小),有y=-x成立;x=1时,y=-x*pi/4。
如果你愿意,可以把这段区域用y=-x和y=-x*pi/4包起来。
因此,知道了相角,由高中数学三角函数知识,显然可以得到对应的时间:

结论:近似的,通过时间常数为τ的一阶系统,若输入的交流信号频率处于相对中低频(低于转折频率fc),输出产生的延迟约在0.785τ~τ之间。
总结下
这就是大家的直觉印象,交流信号通过时间常数τ的滤波器,会产生大约τ的时域延迟的由来。
但要注意,该结论的近似条件,只到转折频率fc,也就是低频才可等效。
某种程度上,这也直接从时域等效的角度,解释了耳熟能详的:在相对低频段,τ的纯延迟环节可以和时间常数τ的一阶惯性环节,相互近似等效。
如果从频域的角度,画出延迟环节(含e的超越函数)的波特图曲线,可以发现在低频段,其相角和一阶系统差异很小。
究其数学根本,就是高数的泰勒展开近似。感兴趣的同学可以自行查阅陈伯时老师的“电力拖动自动控制系统”课本,附录中针对该近似的推导。
*博客内容为网友个人发布,仅代表博主个人观点,如有侵权请联系工作人员删除。

